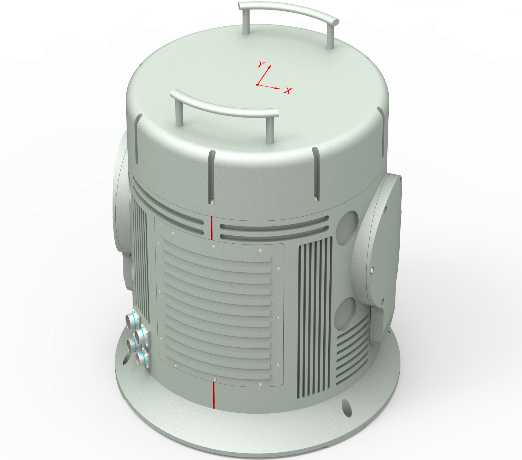
RLG Two-Axis Indexing Inertial Navigation System




Mafotokozedwe Akatundu
RL2-90 Inertial Navigation System, njira yodutsa m'mphepete mwakuyenda bwino.Yokhala ndi mtundu wa 90 mphete ya laser gyroscope ndi quartz flexible accelerometer, imapereka liwiro lolondola, malo, komanso chidziwitso chamalingaliro.Imalumikizana mosasunthika ndi GNSS, ma altimeters, ndi ma airspeed mita, ndikupangitsa kuti ikhale yoyenera kwa onyamula mpweya ndi pansi.Kaya mu akasinja, magalimoto okhala ndi zida, ndege, ma drone, zombo, kapena njanji yothamanga kwambiri, dongosololi limatsimikizira kuwongolera kodalirika kwa ndege, kukhazikika kwamalingaliro, ndi malo.Ndi kulondola kwambiri pamayendedwe onse osasunthika komanso njira zophatikizira zophatikizika, RL2-90 ndi mnzanu wodalirika wodalirika komanso wolondola pamagwiritsidwe osiyanasiyana.
PNKHANI ZOCHITIKA
l Njira yolozera ma axis-axis kuti muchepetse zolakwika
l Mkulu wolondola mphete laser gyro ndi quartz accelerometer
l Kudzilungamitsa kokhazikika kapena kosuntha
l Zolakwa magawo calibration ndi chipukuta misozi mu zonse kutentha osiyanasiyana
l Kusankha kolowera kosiyanasiyana kwa GNSS/Odometer/DVL
l Njira zosinthira zoyenda
l Kuyenerera kwabwino kwa chilengedwe
l Miyezo yankhondo
APPLICATION MALO
l Kuyenda kwagalimoto pansi panyanja
l Kuyika ndi kupeza kumpoto kwa galimoto yamtunda
l Kukhazikika ndi kuwongolera kwa chonyamulira chosuntha
l Muyezo wamakhalidwe pamapulogalamu omwe akufuna
MNTCHITO ZA AIN
l Ili ndi ntchito yotulutsa zidziwitso monga malo onyamulira, mutu, ngodya yamalingaliro, kuchuluka kwa angular ndi liwiro munthawi yeniyeni;
l Ili ndi njira zogwirira ntchito monga kuyenda kopanda inertial ndi INS/GNSS (kuphatikiza Beidou) mayendedwe ophatikizika;
l Kukhala ndi ntchito yolandila zidziwitso zapa satellite zoperekedwa ndi zida zakunja zanthawi yamafupipafupi;
l Imakhala ndi ntchito yodzigwirizanitsa pansi ndikuthandizira ntchito ya mpweya;
l Lili ndi ntchito monga kudziyesa mphamvu, kudziyesa nthawi ndi nthawi, lipoti la chikhalidwe, kubwezera zolakwika za unsembe, ndi kusunga kosasunthika.
PZIZINDIKIRO ZA NTCHITO
| Kulondola kwadongosolo Kulondola Kwadongosolo | Pure Inertial Navigation/Pure Inertial Navigation | 2.0nmile/5d, PEAK | |
| Integrated Navigation/Navigation with GNSS | ≤5m , 1 p | ||
| Mutu wamutu / Mutu | 0.01 °, RMS | ||
| Makhalidwe opingasa (kuzungulira ndi kukwera) Mkhalidwe Wopingasa (kuzungulira & kukwera) | 0.005 °, RMS | ||
| Kuthamanga Kwambiri Kwambiri | 1.0 m/s, RMS | ||
| GNSS Integrated navigation Velocity | 0. 1 m/s , RMS | ||
| Zizindikiro za zipangizo inertial Gyro ndi Accelerometer Parameters | laser gyroscope _ Gyroscope | Range/Range | ± 600 deg/s |
| Tsankho Kukhazikika | ≤0.002 deg/h, 1σ | ||
| Kubwerezabwereza Kokondera | ≤0.002 deg/h, 1σ | ||
| Scale Factor yopanda mzere | 1 ppm | ||
| Accelerometer Accelerometer | Range/Range | ± 15g | |
| Tsankho Kukhazikika | ≤10μg, 1σ | ||
| Zero bias repeatability Kubwerezabwereza Kokondera | ≤10μg, 1σ | ||
| Scale Factor yopanda mzere | 15 ppm | ||
| gwirizanitsani nthawi Nthawi Yogwirizanitsa | Chiyambi Chozizira | ≤ 15 min | |
| Yambitsaninso | ≤ 10 min | ||
| Kuyamba kwa Air/Ndege | ≤15min | ||
| Maola ogwira ntchito Nthawi Yogwira Ntchito | Nthawi yogwira ntchito / nthawi yogwira ntchito | kuposa 10h | |
| Mawonekedwe a Chiyankhulo mawonekedwe | Mphamvu yamagetsi / Voltage | 18-36 VDC | |
| Kugwiritsa Ntchito Mphamvu | ≤ 40W @ 24VDC | ||
| Mawonekedwe amagetsi / Magetsi | RS232 × 2 RS422 × 3 × 2 Efaneti × 1 1px1 | ||
| Mtengo Wosintha Zambiri (zosasinthika) | 200Hz@115.2kbps | ||
| Gwiritsani ntchito chilengedwe Zachilengedwe | Kutentha kwa Ntchito | -40°C ~+65°C | |
| Kutentha kosungirako / Kutentha Kosungirako | -55°C~+85°C | ||
| Gwiritsani ntchito Altitude/Altitude | 20000m | ||
| Chinyezi | 95% (+25°C) | ||
| Kugwedera/Kugwedezeka | 5g @ 20 ~ 2000Hz | ||
| Kugwedezeka / Kugwedezeka | 40 g, 11 ms, 1/2 Sine | ||
| Thupi katundu Zakuthupi | Makulidwe/ Kukula (Φ*H) | 540 x 536 mm | |
| Kulemera/ Kulemera kwake | 55kg pa | ||
Zindikirani: Kapangidwe kake kakhoza kusinthidwa malinga ndi zomwe wogwiritsa ntchito akufuna.